
LG CNS 독자 여러분, 안녕하세요! 미디어 아티스트 송준봉입니다. 지난달까지 ‘예술과 IT’라는 주제로 미디어 아트 작업과 사용된 기술을 소개해드렸는데요. 이번 달부터는 매달 하나의 미디어 작업을 선정하여, 그 작업이 어떻게 제작되었는지 알아보고, 그 일부분 혹은 축소판을 직접 제작해보는 시간을 가져보려고 합니다.

‘Make Media Art’라는 주제로 이전에 소개해 드렸던 알고리즘 아트부터, 피지컬 컴퓨팅, 프로젝션 맵핑 등 다양하게 시도해 볼 예정인데요. 예술뿐 아니라 Make문화1에 관심이 있는 독자분들도 재미있게 읽으실 수 있지 않을까 생각합니다. 그럼 지금부터 ‘Make Media Art’, 첫 번째 주제를 시작해 볼까요?
● Random-international의 대표작 ‘Rain Room’
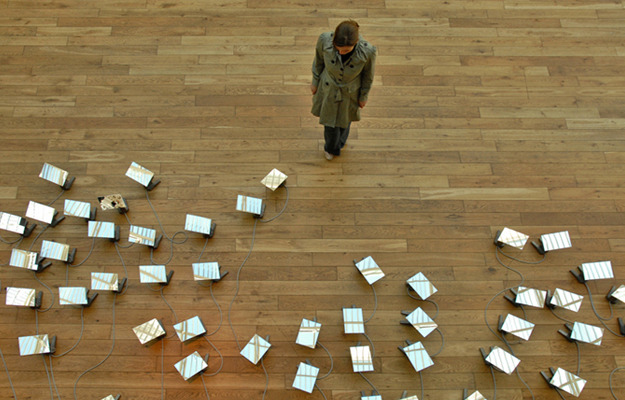
l Audience (Mirror, motors, camera, computer, custom software), Dimensions variable, 2008
(출처: http://random-international.com/work/audience/)
이 작업은 손바닥보다 조금 큰 거울을 달고 있는 수십 개의 로봇이 있는 방 안에서 이뤄집니다. 관객이 방 안에 들어가는 순간, 모든 로봇이 관객을 비추면서 신기한 듯 계속 쳐다보는 아주 귀엽고 재미있는 작업입니다. 마치, 사람을 처음 본 작은 거울 로봇 군단을 보는 듯한 느낌도 듭니다. 하지만, 결국 거울을 통해 보이는 것은 관객 자신의 얼굴이기 때문에, 관객에 따라 다양한 느낌을 전달받게 되지 않을까 생각이 드네요.

l Audience (Mirror, motors, camera, computer, custom software), Dimensions variable, 2008
(출처: http://random-international.com/work/audience/)
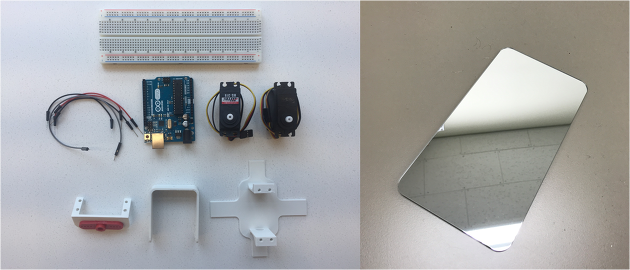
l 준비물 : 아두이노/ Servo motor 2개 / Bread board / 3d printer / Jumper cable / 거울 / 웹캠(노트북)
① 하드웨어 만들기
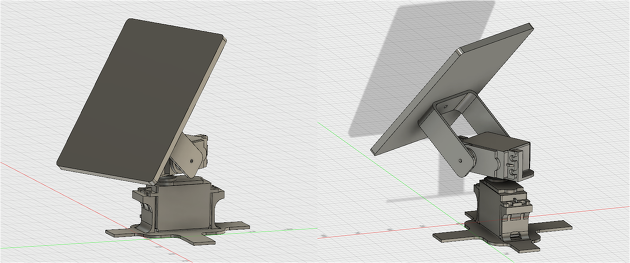
l Fusion 360 프로그램을 사용해 제작된 Mirror Robot의 3D Modeling
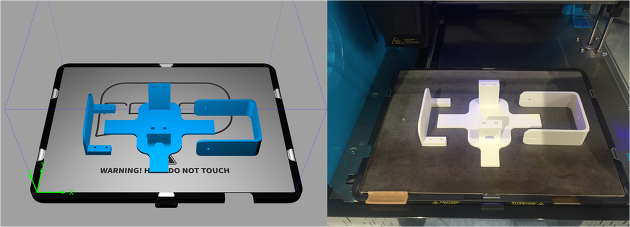
l 3D 프린터를 사용해 제작된 모터 연결 Bracket 부품들
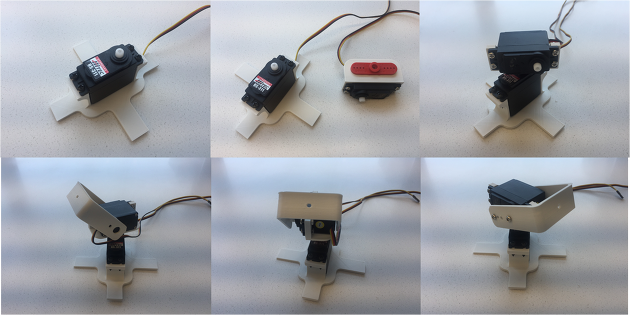
l Servo Motor와 제작된 Bracket의 조립 과정 및 움직임 테스트
이제 설계하여 제작된 부품을 조립해 봅시다. 일반적으로 이 과정이 한 번에 끝난다면, 당신은 정말 타고난 설계자입니다! 보통은 어딘가 안 맞는다거나 쉽게 부서진다거나 해서, 다시 설계와 제작 그리고 테스트를 반복하게 됩니다. 실패가 많을수록 완성되었을 때, 기쁨이 커지기 때문에 끝까지 포기하지 마시길 바랍니다. 저는 위의 그림과 같이 완성했습니다.
② 소프트웨어 만들기
● Servo motor 구동 예제 프로그램
마지막으로 아두이노가 모터를 움직일 수 있도록 전선을 연결하도록 합니다. 연결 방법은 아래 그림과 같습니다.

l Arduino Servo motor 구동 예제(좌), 2개의 Servo motor 구동 연결 방법(우)
두 번째로 만들어야 하는 프로그램은 ‘Face Tracking(얼굴 인식)’ 프로그램입니다. 최근 스마트폰 카메라 등에서 ‘Face tracking’이 많이 사용되고 있기 때문에 많은 분이 익숙하시겠지만, 대부분 ‘내가 이걸 어떻게 만들어?’ 라고 생각하실 텐데요. 사실, ‘Face Tracking’은 관련 Library가 최근 많이 공개되어 어렵지 않게 구현 가능합니다. 심지어 이미지 프로세싱을 전혀 모르는 경우에도 말이죠!
제가 이번 작업에서 사용한 Library는 몇 번 언급되었던 미디어 작가 ‘kyle mcdonald’의 ‘FaceOSC’ 입니다. ‘FaceOSC library’는 이미지 처리 속도도 빠를 뿐 아니라 눈, 코, 입 등의 상세한 정보까지 바로 뽑아낼 수 있어 매우 유용합니다.
이제 ‘FaceOSC’로 얻어낸 얼굴의 위치를 ‘아두이노’로 전달하는 부분만 남았는데요, 저는 ‘Processing’ 프로그램으로 USB 케이블을 사용하여 Serial Transfer로 전달하도록 만들었습니다. 아두이노와 ‘Processing’의 Serial Transfer 예제는 ‘Processing’ 프로그램의 ‘Example > Libraries > Serial > SimpleWrite’에서 확인할 수 있습니다.
● Processing 프로그램
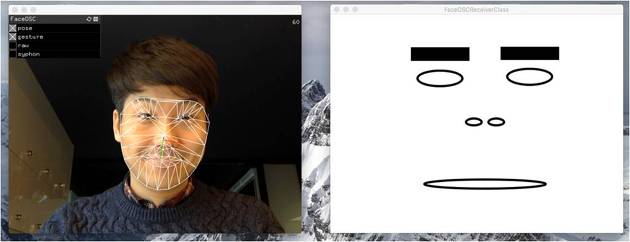
l FaceOSC 를 사용하여 Face Tracking을 수행하여 얼굴의 각 부분의 위치를 나타낸 모습
③ 완성과 마무리
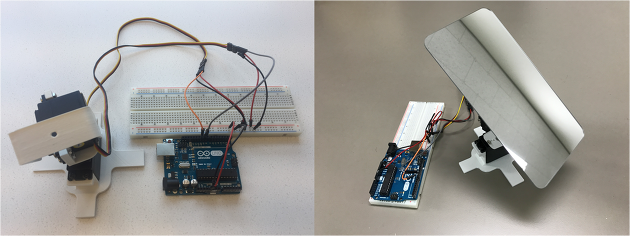
l 마지막 배선과 조립 완료 이미지
l 완성된 Audience Single Version – ‘나만 봐주라’
오늘 Make Media Art 첫 번째 시간으로, ‘Random-international’의 ‘Audience’를 만들어 보았습니다. 아마도 많은 독자분이 어렵게 느끼셨을 듯한데요. 꼭 따라서 해본다기보다는 어떤 과정을 거쳐서 미디어 아트가 만들어지는지 조금 더 다가간다는 느낌으로 생각하고 봐 주시면 좋을 것 같습니다.
물론 이를 계기로 직접 만들어보시는 분들이 계시면 더욱 좋겠지만요! 다음 시간에는 좀 더 쉽게 따라 해 볼 수 있는 작업으로 다시 찾아오겠습니다!
teamVOID는 현재 송준봉, 배재혁으로 이루어진 미디어 아트 그룹으로, 기술과 예술의 융합을 주제로 로봇, 인터렉티브, 키네틱, 라이트 조형 등 다양한 뉴미디어 매체를 통해 실험적인 시스템을 구상하고 그것을 작품으로서 구현하고 있습니다.
[‘Make Media Art’ 연재 현황]
* 해당 콘텐츠는 저작권법에 의하여 보호받는 저작물로 LG CNS 블로그에 저작권이 있습니다.
* 해당 콘텐츠는 사전 동의없이 2차 가공 및 영리적인 이용을 금하고 있습니다.
- 디지털 기기와 다양한 도구를 사용한 창의적인 만들기 활동을 통해 자신의 아이디어를 실현하는 문화 (출처: https://www.makeall.com/subpage.php?p=maker_info) [본문으로]
'IT Life' 카테고리의 다른 글
| 쉽게 따라 하는 미디어 아트 - Make Media Art [1편] Audience (0) | 09:30:03 |
|---|---|
| 누구나 전략 기획 고수가 될 수 있다 - 문제 해결 프로세스 #2 (0) | 2017.03.24 |
| 직장 생활을 위해 알아두면 좋은 얕고 넓은 지식 – 비즈니스는 어떻게 구성되는가 (0) | 2017.03.17 |
| 핵티비즘, 해킹을 통해 그들의 목소리를 외치다. (0) | 2017.03.16 |
| 가방이 짐이 되던 시대는 지났다, 스마트 캐리어 (0) | 2017.03.10 |
| IoT로 변화하는 리테일 산업 (0) | 2017.03.09 |